Here is a project including an optimization algorithm I’ve been developing in AI. Its a bit targeted towards a Societal Benefit Area than necessarily a Robotics one. However, it still is a scalable approach in coordinating multiple agents with different objectives, or being of unique parties.
You can find more about the project including an overview, documentation, source code, and references available at my github page or read on below: Multi-Party Capacity Constrained Route Planning
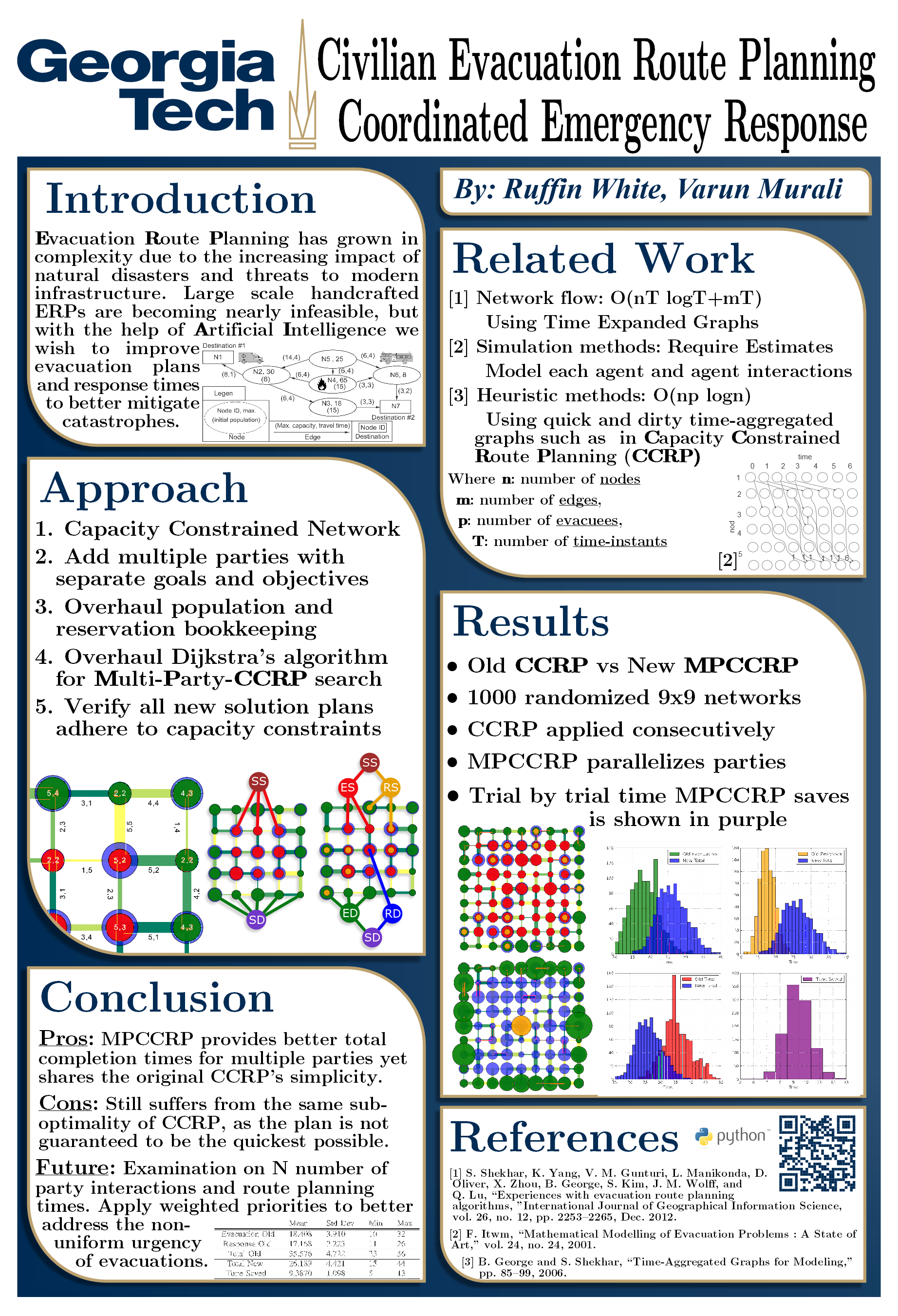
Evacuation Route Planning (ERP) has grown ever more imperative due to the increasing impact of natural disasters and threats of terrorism on modern infrastructure. To help mitigate loss due to these and similar large-scale situations such as nuclear disasters, ERP tasks are becoming more complex. Other complicating elements include increasing population densities, larger structures within urban environments served by multifaceted transportation networks. Because of the multitude of factors, all driving the problem toward greater scales, the ability to handcraft ideal ERPs has become nearly infeasible. This has led emergency planners to turn to artificial intelligence algorithms to quickly generate optimal paths for large-scale civilian evacuations under multiple scenarios. Multi-Party Capacity Constrained Route Planning (MPCCRP) is project geared towards developing a modified version of the original CCRP algorithm for multiple parties with separate objectives. Such scenarios include civilian evacuation route planning with additional emergency response coordination.